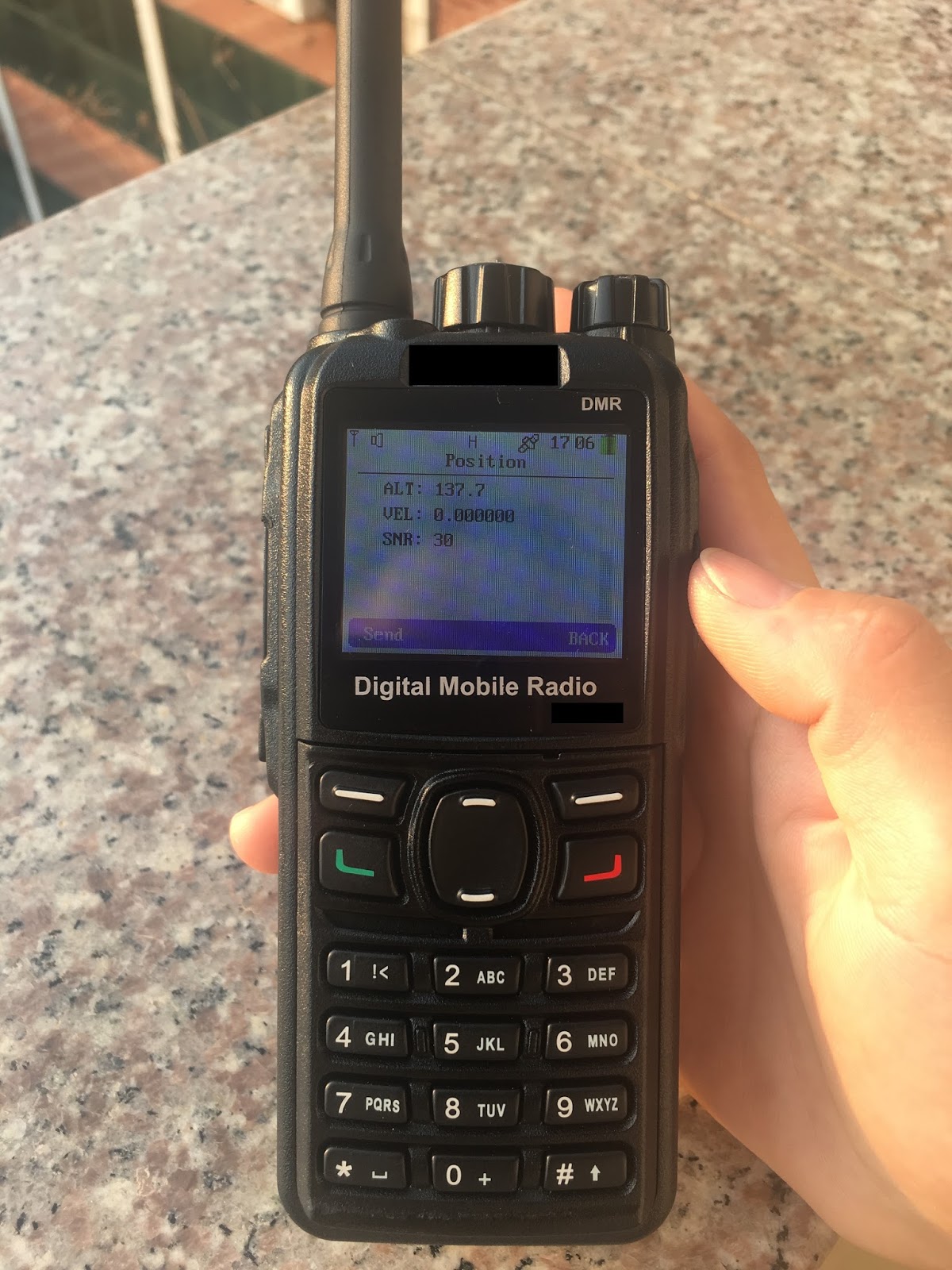
GPS Position Reporting. Among other features, DMR supports GPS position reporting. This was created for the Part 90 world, not ham radio. There is no provision for sending your ham radio call sign along with your position report so unlike with APRS, Part 97 ID requirements are not being met if your radio is making periodic position reports and you are otherwise not conversing and saying your call sign at the required times. Please take this into consideration if you activate GPS position reporting in your DMR radio and take action to stay in compliance.
Each DMR radio vendor has their own format for GPS position reporting. This is not an issue for Motorola, Hytera, and Tytera GPS-equipped radios because BrandMeister can pass your report to the dstar.su server for formatting and transfer to APRS. Step 1 is common to all three brands, setting up your call sign, SSID, and symbol that you want to appear on APRS.
You need to register and this can take a few hours or up to a day to happen. Step 1: Go to the dstar.su self-care web page https://www.dstar.su/selfcare/ and register. Once you are on the main self-care page, select Ham DMR. They need to know your radio brand, position reporting interval, desired SSID to go with your call sign, APRS symbol, and DMR Radio ID. If you are not experienced with APRS, we suggest an interval no less than every 3 minutes and just your call sign without dash anything.
Once registered and set up you should be able to send GPS data to ID 5057
Some radios allow auto send every X minutes others allow you to send your position via a text. Both seem to work well on BM network.
You can also send and receive messages over APRS by sending a text to 5057
Call sign ssid message
Note capitals for call sign
E.g
2E1AVX hello James
Or
M0JFP-7 hello James
You can check if positioning and messaging is working by going to http://aprs.fi and typing in your call sign.
We had a few questions in recently about how DMR works in a real world situation and what the additional features do and how they can be used.
We set up a small Lab and did a bit of testing to show you what can be done and created a few short video examples.
Be aware upfront, these features can be added and removed from each individual radio by using the CSP programming software.
Basic configuration
We have set up 4 radios, one manager and 3 which are in different work groups.
A manager needs to be able to speak to each work group and each individual and call everyone if needed.A manager also has advanced features such as radio check, remote monitor and kill / retrieve.
Users can communicate in their own groups between each other, they can receive a call to the group and a call to everyone or a direct call. They can make a direct call to a user as well,
Basic Opperation
Here we show the manager calling each group in turn. each radio gets the message and logs a missed call. When you click on OK it shows who was calling you and you can respond back directly to them.
We then show the everyone call, where the manager radio calls to everyone and all radio's regardless of group will receive the transmission. They can respond direct, or change the channel on the radio to broadcast to every as well. Useful in urgent situations (fire alarm or other emergency)
Advanced features
In this first part we discuss radio detection, remote monitoring, kill and revive features.
Radio detection, simply sends a digital signal to the destination radio to see if it is responsive.
You get either an OK or a fail. The remote radio user is unaware of this request as nothing is seen on screen or heard.
Remote monitoring, sends a signal to the destination radio and forces it to key up the transmitter and transmit for 10 seconds. This allows you to hear what is happening on the remote users side.
Again this is not noticeable on the remote radio screen or audio, even the LED TX light stays green.
Kill and Revive, This is another digital signal sent to a specific radio ID and will render the radio useless, not able to TX or RX or get into the menu. Revive brings the radio back to functioning as expected.
SMS / Text Messaging
DMR allows up to 32 characters to be sent as a text message between radios.
Just like your mobile phone this can be really useful when a voice contact is not required.
You can share quick updates, request a phone call or share an e-mail address, or deliver address / next call.
Text messages can be sent from one to one, one to group or one to everyone
The video demonstrates one to all message being sent and also one to one.
Emergency Alarm DMR feature
Here we have a quick demonstration of the emergency alarm feature.
We have set this up to be as loud as possible on both radios.
Note the sending radio can be set to stay quiet (I'm in danger, enemy is close, need help) but don't want your radio making any noise.
2 Radios one in the Reception group and one in the Cleaner group.
Pressing and holding the button on the side for 1 second activates the alarm, all radios in range will see the red alert message and the DMR ID of the radio sending the message
The screen flashes between channel red alert and User ID
GPS Set Up and use
Encryption
The last feature we will take a quick look at is the aility to encrypt you voice and data.
We use a free piece of software called DSD Plus, this will happily decode DMR signals which are not encrypted.
First video shows a simple test decode (no encryption
Our Second video is after the encryption is set up on the radio (very simple) and all you hear is noise.
HSMM-Pi is a set of tools designed to easily configure the Raspberry Pi to function as a High-Speed Multimedia (HSMM) wireless mesh node, compatible with Broadband Hamnet (BBHN) and AREDN. Mesh networks offer amateur radio operators (hams) the ability to operate high-speed data networks in the frequencies shared with unlicenced users of 802.11 b/g/n networking equipment. Hams can operate HSMM or BBHN at higher power with larger antennas than are available to unlicensed users. The HSMM-Pi project makes it possible to run an HSMM mesh node on the Raspberry Pi. The project has been tested to work on other embedded computing platforms, including the BeagleBone and BeagleBone Black.
The HSMM-Pi project can used by people not possessing an amateur radio license so long as they are in compliance with the transmission rules set by the FCC or the local regulating body. This typically means sticking with the WiFi antenna provided with your WiFi adapter.
The project consists of a PHP web application that is used to configure and monitor the mesh node, and an installation shell script that installs dependencies and puts things in the right spots.
The HSMM-Pi project is designed to run on Ubuntu 12.04 systems. Rather than providing an OS image for HSMM-Pi, I've instead created an installation script that will transform a newly-imaged host into an HSMM-Pi node. This has several benefits:
Greater transparency: You can see exactly which changes are made to the base system by looking at the install shell script.
Easier to port to more platforms: Any platform that runs the supported Ubuntu releases ought to be capable of running HSMM-Pi
Easier to host: I only need to post the installation script and webapp files on Github and it's done.
Easier to seek support: Ubuntu is widely used and supported, no need to introduce another customization.
Hardware Requirements
HSMM-Pi has been tested to work with the Raspberry Pi running the Raspbian OS, with the BeagleBone running Debian, and with the BeagleBone Black running Ubuntu 12.04 from the onboard eMMC flash memory. The requirements for each are listed below.
Raspberry-Pi Node:
Raspberry Pi (any model)
USB WiFi adapter (tested with the N150 adapter using the Ralink 5370 chipset, and with the Alfa AWSU036NH), or built-in WiFi adapter (on Raspberry Pi 3)
SD memory card (4GB minimum)
BeagleBone Node:
BeagleBone or BeagleBone Black
USB WiFi adapter (tested with the N150 adapter using the Ralink 5370 chipset)
SD memory card (4GB minimum) (in the case of BeagleBone Black, used for initial imaging of the eMMC flash memory only)
Modes
HSMM-Pi has two modes: Internal and Mesh Gateway. A description of each is provided below.
Mesh Gateway Mode
A node in Mesh Gateway mode routes traffic throughout the mesh, and provides the mesh with Internet access through the wired Ethernet port. The gateway obtains a DHCP lease on the wired interface, and advertises its Internet link to mesh nodes using OLSR.
Internal Mode
A node in Internal mode routes traffic throughout the mesh and provides mesh access to any hosts connected to its wired Ethernet port. The node in this mode runs a DHCP server that issues DHCP leases to any hosts on the wired connection. It also runs a DNS server that can provide name resolution for both mesh nodes and Internet hosts. The following diagram shows how the two types of nodes can be deployed:
There could be any number of mesh nodes in the Ad-Hoc WiFi Network. The route among the nodes is managed entirely with OLSR.
I've done all of my testing with N150 USB wifi adapters that use the Ralink 5370 wireless chipset. These adapters are cheap (~$7 USD), compact, and easy to come by. They also use drivers that are bundled with most Ubuntu distributions, making setup easy. The N150 adapter tested included a threaded antenna connector that should make it easy to add a linear amplifier and aftermarket antenna (outside the scope of the HSMM-Pi project).
Raspberry Pi Installation
Download the Raspbian Jessie or Raspbian Jessie Lite disk image. The Lite image is suitable for headless installations as it omits the graphical interface, web browser, etc.
Connect the wired Ethernet port on the Pi to a network with Internet access
Apply power to the Pi
Login to the Pi through an SSH session, the console, or the terminal application. The username is "pi" and the password is "raspberry".
Run the Raspberry Pi Setup program:
sudo raspi-config
Expand the filesystem to fill the SD memory card
Change the password for the "pi" account
If installing over an SSH connection to the Pi, then I recommend you install "screen" (sudo apt-get install screen) to ensure that the installation script is not stopped prematurely if you lose connectivity with the Pi. This is optional, but I highly recommend using screen if installing over the network. You can find more info on screen here:http://linux.die.net/man/1/screen
Run the following commands to download the HSMM-Pi project and install
sudo apt-get update
sudo apt-get install -y git
git clone https://github.com/urlgrey/hsmm-pi.git
cd hsmm-pi
sh install.sh
Login to the web application on the Pi: http://(wired Ethernet IP of the node):8080/
Access the Admin account using the username "admin" and password "changeme".
Write the image to an SD memory card using the steps on the page referenced in the previous step
Insert the SD card into a BeagleBone Black board
Apply power to the BeagleBone Black
Login to the BeagleBone Black through an SSH session or the console using the 'ubuntu' account
Transfer the image to the running BeagleBone Black using SCP
Write the image to the eMMC flash memory using the steps mentioned in the first step here.
Wait for all 4 LEDs to go solid (could take several minutes)
Shutdown the Beaglbone Black (sudo /sbin/init 0)
Remove the memory card from the BeagleBone Black
Apply power to the BeagleBone Black
Login to the BeagleBone Black through an SSH session or the console using the 'ubuntu' account
Change the password for the 'ubuntu' account
Install the development tools necessary to build OLSRD and retrieve the HSMM-Pi project:
sudo apt-get upgrade
sudo apt-get install make gcc git
If installing over an SSH connection, then I recommend you install 'screen' (sudo apt-get install screen) to ensure that the installation script is not stopped prematurely if you lose connectivity. This is optional, but I highly recommend using screen if installing over the network. You can find more info on screen here: http://linux.die.net/man/1/screen
Run the following commands to download the HSMM-Pi project and install
git clone https://github.com/urlgrey/hsmm-pi.git
cd hsmm-pi
sh install.sh
Login to the web application: http://(wired Ethernet IP of the node):8080/
Access the Admin account using the 'admin' username and 'changeme' password.
Change the password for HSMM-Pi
Configure as either an Internal or Gateway node
Upgrade Steps
This is experimental, and you should fall back to a fresh installation if things aren't functioning as you'd expect. This is supported only on the HEAD of the master branch at this time.
Login to the host using SSH or the console
Run the following commands to upgrade:
cd ~/hsmm-pi
git pull
sh install.sh
Access the web UI and check the configuration. Save the Network and Location settings, even if no changes are needed.
If the save operation fails, then you might need to replace the SQLite database file due to database schema changes. Run the following command:
cd ~/hsmm-pi/
sudo cp src/var/data/hsmm-pi/hsmm-pi.sqlite /var/data/hsmm-pi/
Repeat the step of reviewing and saving the configuration through the web UI.
Internal Mesh Node Configuration
This represents the minimum set of steps:
Select Admin->Network from the menubar
Configure the WiFi interface:
Specify an IP address that will be unique throughout the mesh network. This will be different every mesh node. A default will be provided based on the last 3 fragments of the WiFi adapter MAC address.
Configure the Wired interface:
Set the Wired interface mode to LAN
Configure the Mesh settings
Specify your node name, likely a composition of your callsign and a unique number in your mesh (i.e. KK6DCI-7)
Click 'Save'
If successful, click the 'Reboot' button in the alert and proceed.
Gateway Node Configuration
This represents the minimum set of steps:
Select Admin->Network from the menubar
Configure the WiFi interface:
Specify an IP address that will be unique throughout the mesh network. This will be different every mesh node. A default will be provided based on the last 3 fragments of the WiFi adapter MAC address.
Configure the Wired interface:
Set the Wired interface mode to WAN
Configure the Mesh settings
Specify your node name, likely a composition of your callsign and a unique number in your mesh (i.e. KK6DCI-7)
Click 'Save'
If successful, click the 'Reboot' button in the alert and proceed.
FAQ
A list of frequently asked questions can be found on our wiki, at the FAQ page.
Three International Space Station crew members are scheduled to return to Earth on Tuesday, Sept. 6. NASA Television will provide coverage of their departure from the orbital outpost and return home, beginning at 9 a.m. EDT Tuesday, Sept. 6.